Featured Series: Robotic Fundamentals
🎬 Episode 1: Introduction to Industrial Robotics & Cobots
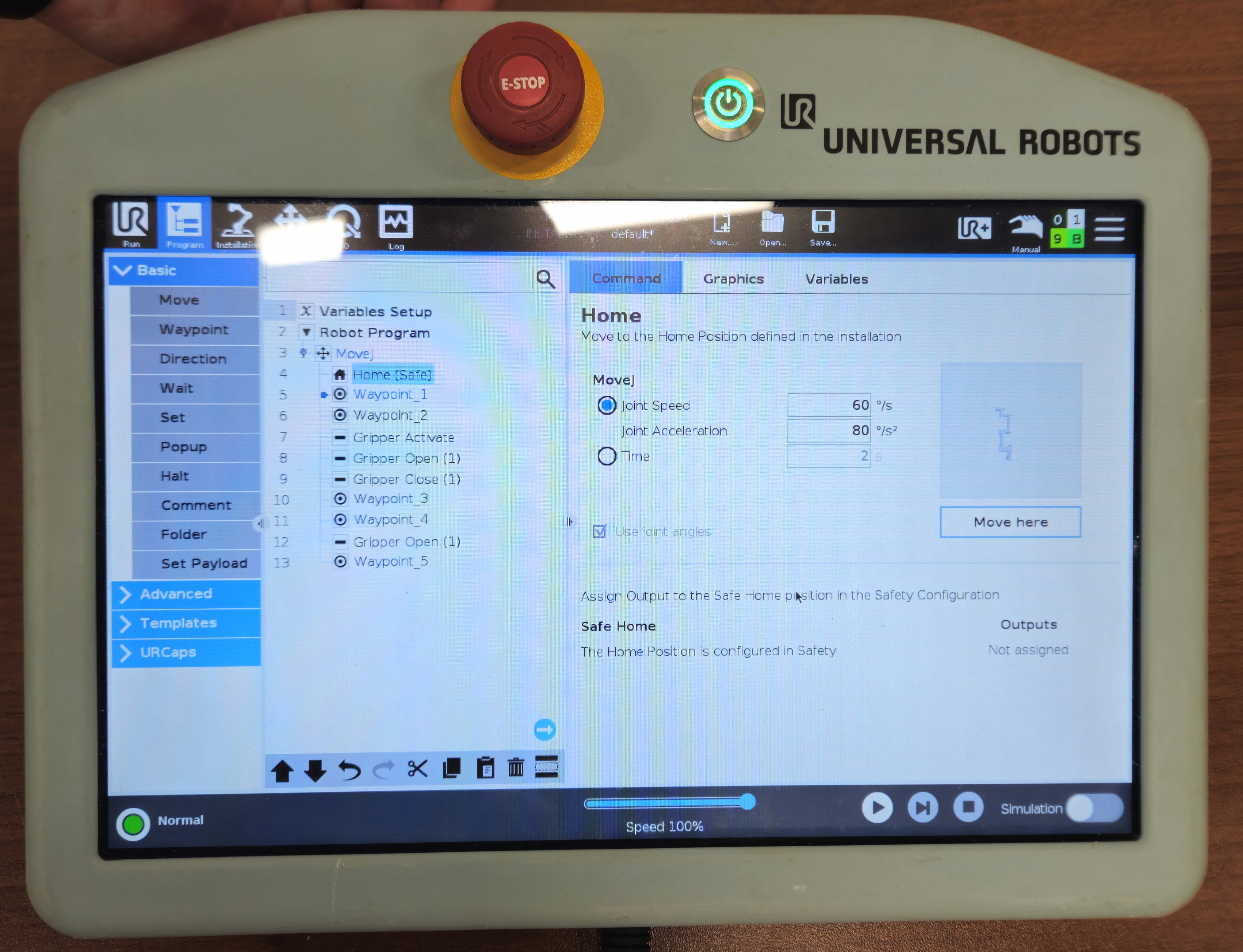
Welcome to my technical video series, Robotic Fundamentals. This series focuses on deep-dive demonstrations where I explain how to configure, program, and execute operations on collaborative robots (cobots) like the Universal Robots UR3e, alongside heavy-duty industrial platforms like Fanuc systems.
Learning Objectives & Instrumentation
This module covers the core essentials of getting a robot moving. I walk through powering on the system, navigating the teach pendant, using free drive, activating an end-of-arm gripper, and configuring a basic program by setting up waypoints.